01.1 / Planning
Dynamic Path Planning
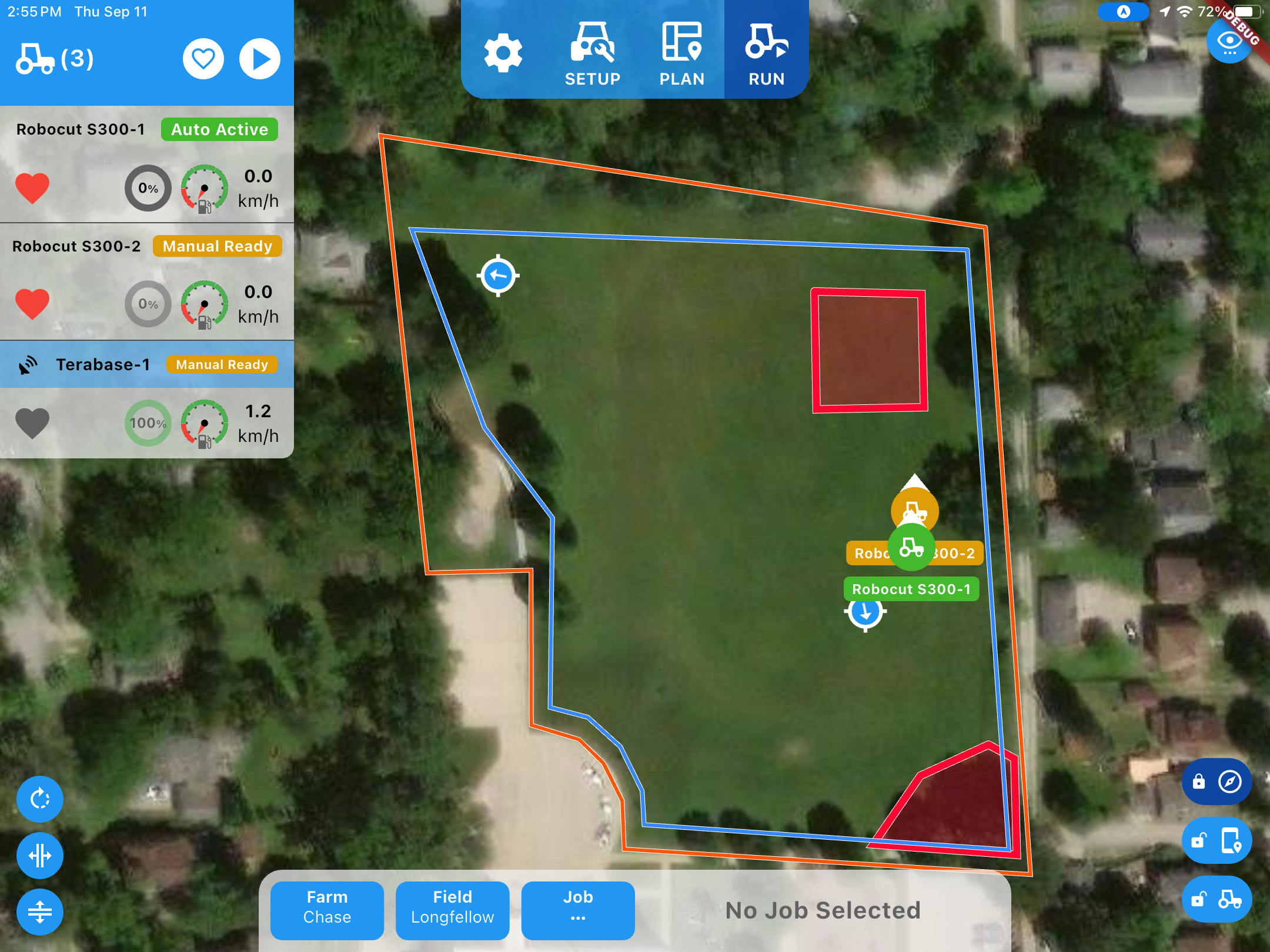
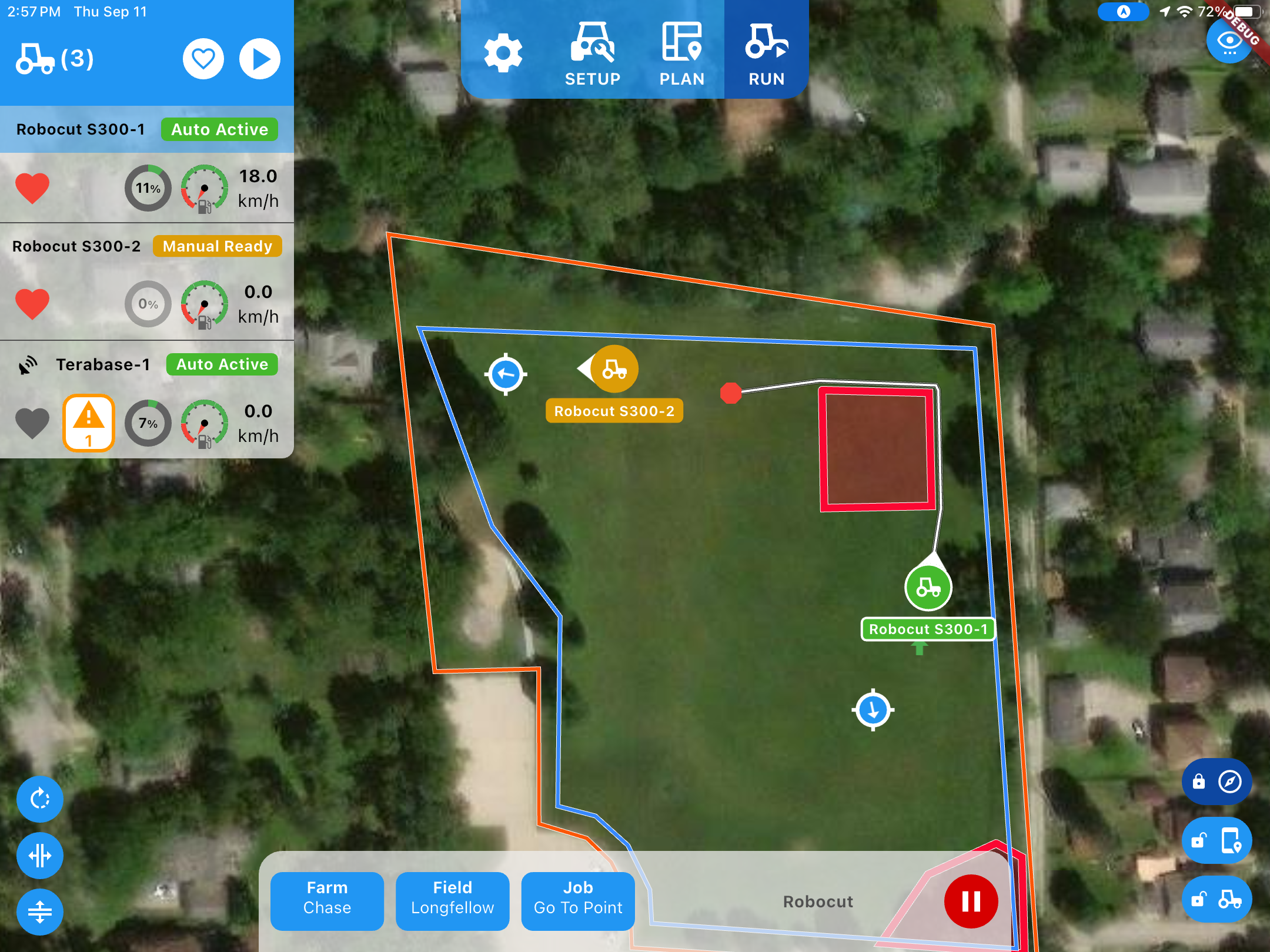
The system calculates optimal paths in real time based on mission parameters, field boundaries, no-go zones, and live sensor data. When conditions change — a new obstacle, a shifted boundary, a machine ahead falling behind — the planner recalculates instantly.
- Defined through Mission Control or imported from GIS files
- Recordable from a human-driven pass (breadcrumb mode)
- Sub-second replan against dynamic obstacles